Deteksi Jalan Berlubang dengan CNN
yang Ditulis dari Nol
Klasifikasi citra jalan berlubang vs jalan normal menggunakan arsitektur LeNet-5 yang seluruh intinya — konvolusi, pooling, ReLU, softmax, cross-entropy, dan backpropagation — diimplementasikan manual dengan NumPy, tanpa framework deep learning.
🔬 Demo Model Live
Unggah foto permukaan jalan, lalu model LeNet-5 (NumPy murni) akan memprediksinya secara langsung di server.
📊 Hasil Pengujian
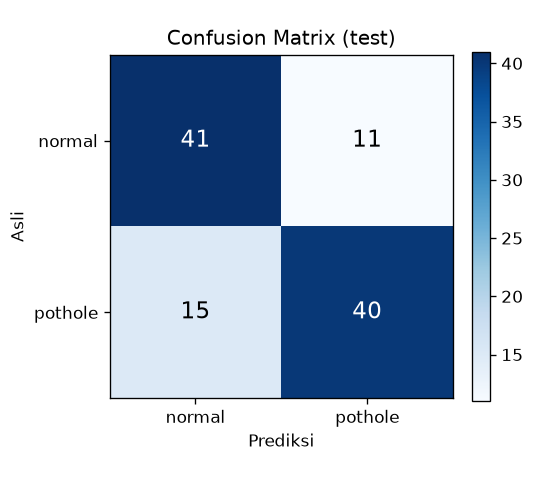
Metrik pada data uji (107 citra yang belum pernah dilihat model).
Confusion Matrix
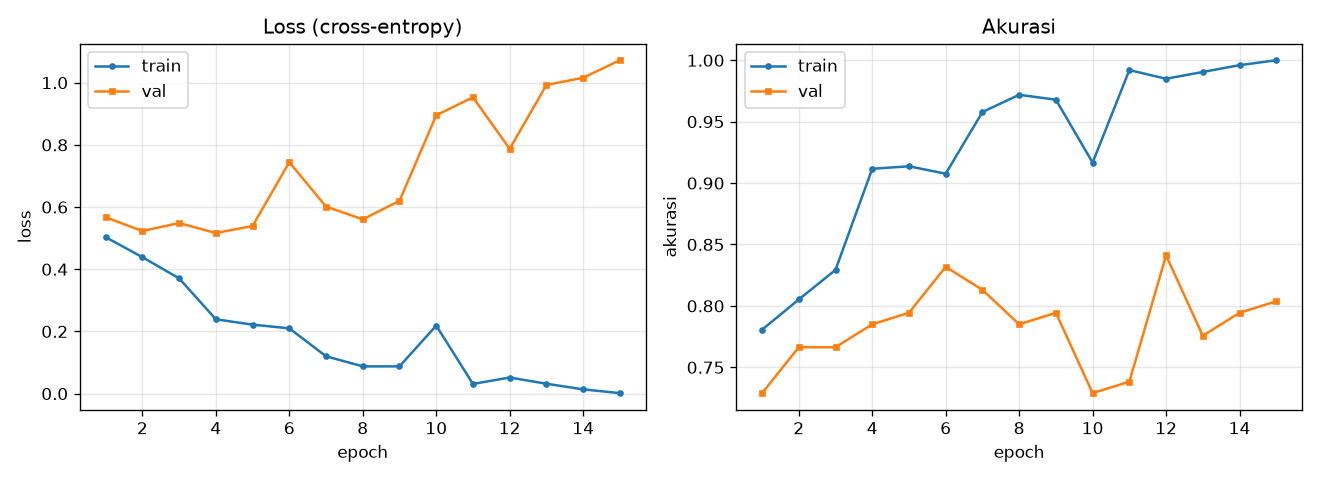
Kurva Pelatihan
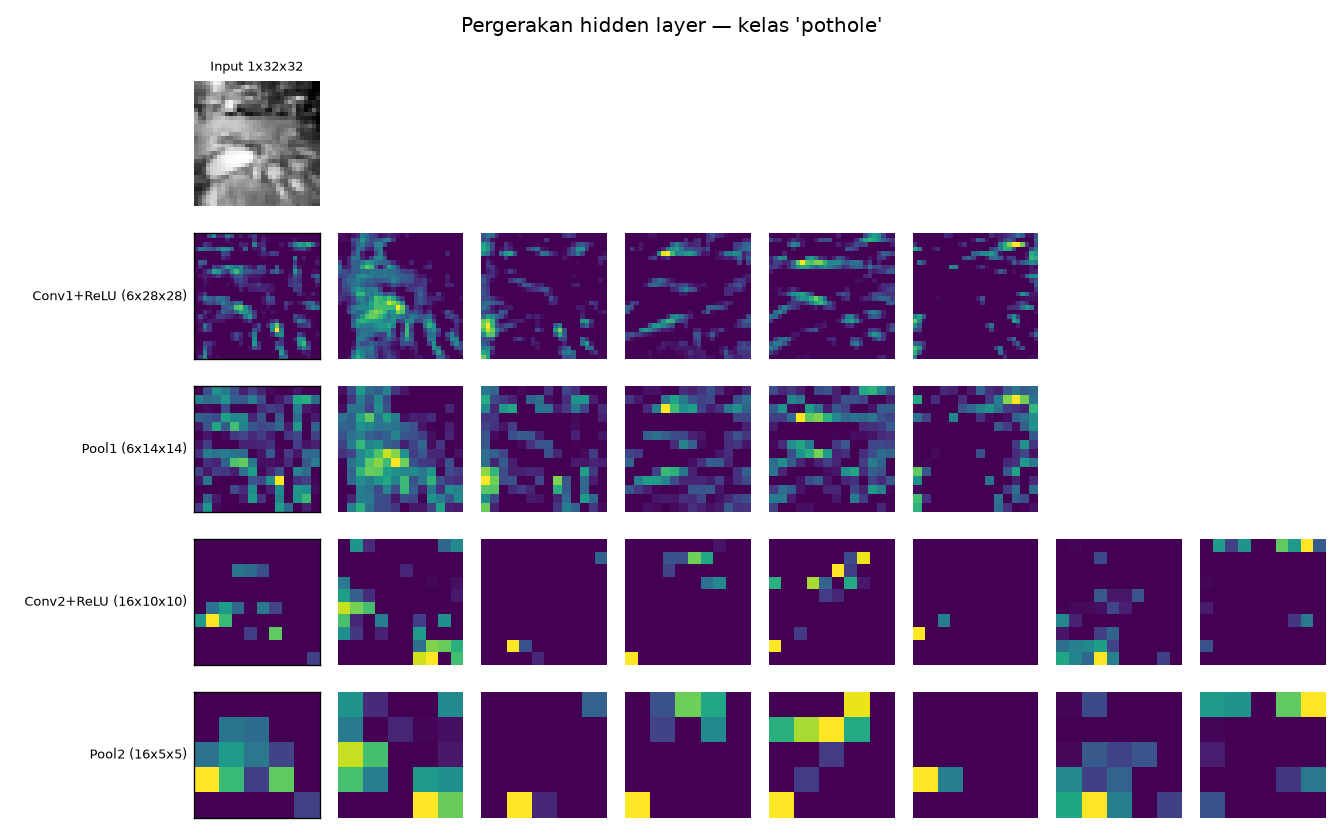
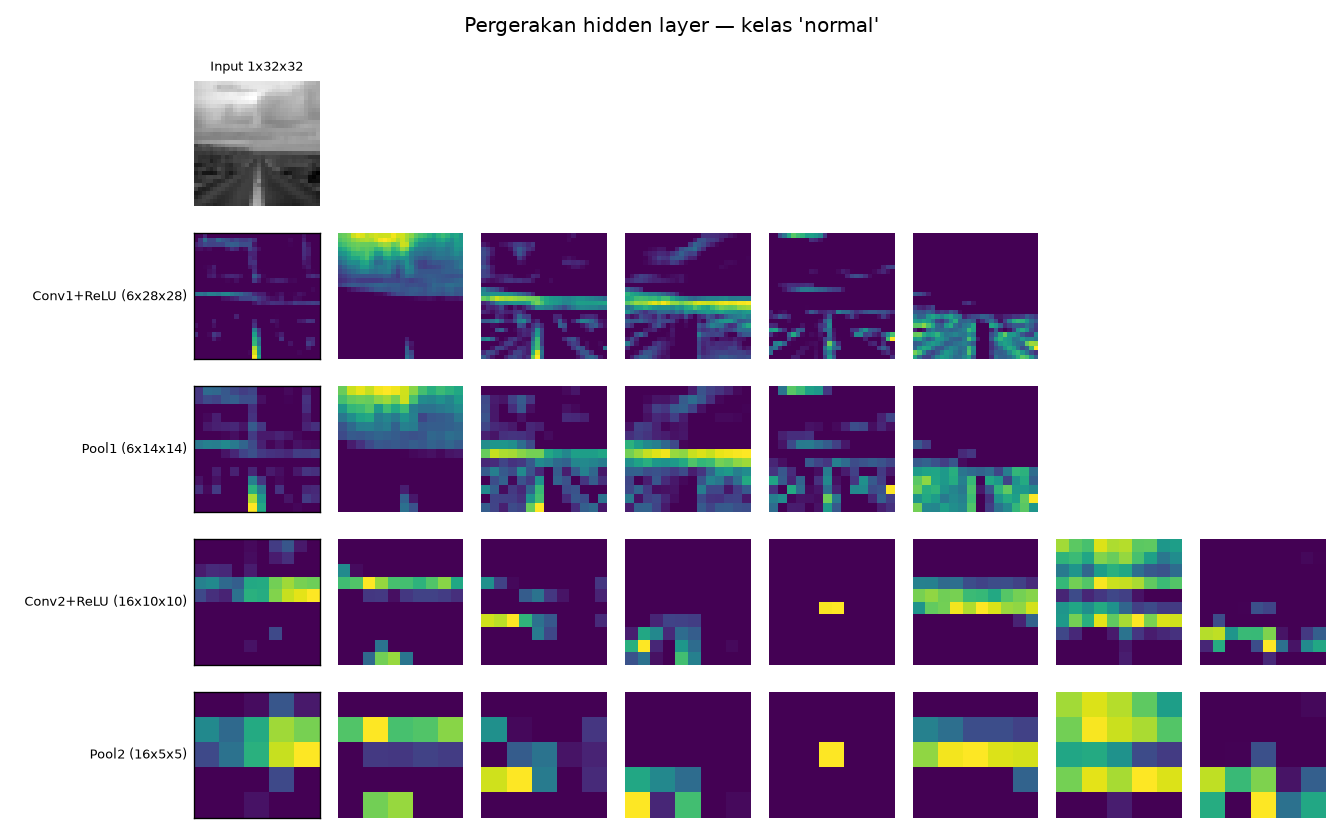
🧠 Arsitektur & Pergerakan Hidden Layer
Aliran dimensi data saat melewati tiap lapisan (rumus ukuran (W−N+2P)/S+1).
1×32×32"] --> B["Conv1 6@5×5 + ReLU
6×28×28"] B --> C["MaxPool
6×14×14"] C --> D["Conv2 16@5×5 + ReLU
16×10×10"] D --> E["MaxPool
16×5×5"] E --> F["Flatten
400"] F --> G["FC-120"] G --> H["FC-84"] H --> I["Softmax
normal/pothole"]
Feature map — pothole
Feature map — normal
📚 Dokumentasi Teknis
Diagram Mermaid memvisualkan aliran data & gradien antar hidden layer.
Ringkasan & Pipeline
Alur penelitian dari data hingga evaluasi.
Arsitektur LeNet-5
Aliran dimensi tiap lapisan + perhitungan.
Forward Pass
Aliran data maju antar hidden layer.
Backpropagation
Aliran gradien mundur (p − y).
Training Loop
Satu iterasi pelatihan (sequence diagram).
Struktur Kode
Class diagram modul cnn.
Kumpulan Formula
Forward & backward tiap lapisan.
📄 Makalah Lengkap
Makalah ilmiah ≥20 halaman (Bahasa Indonesia).